Tutorials & Interface Usage
Welcome to the tutorials for EmbodiedGen V2 — an agentic, simulation-ready 3D world engine for embodied AI. The tutorials are organized by capability: generate sim-ready assets, scale to large scenes, compose task-driven worlds, edit them through dialogue, export to any simulator, and train robot policies inside.
Prerequisites
Make sure to finish the Installation Guide before starting tutorial. Missing dependencies will cause initialization errors. Model weights are automatically downloaded on first run.
🧱 Generate — Sim-Ready 3D Assets
🖼️ Image-to-3D
Generate physically plausible 3D assets from a single input image, supporting digital twin and simulation environments.
📝 Text-to-3D
Create physically plausible 3D assets from text descriptions, supporting a wide range of geometry, style, and material details.
🎨 Texture Generation
Generate high-quality textures for 3D meshes using text prompts, supporting both Chinese and English, to enhance the visual appearance of existing 3D assets.
🧥 Soft-Body Simulation
Text-conditioned garments deploy as deformable meshes in Genesis — the same generate-and-export path, beyond rigid bodies.
⚙️ Articulated Objects (DIPO)
Generate articulated objects from dual-state images with DIPO (NeurIPS 2025).
🦾 Affordance
Semantic part segmentation and grasp pose annotation for sim-ready assets.
🏠 Scale — Large-Scale Scenes
🏠 Room Generation
Generate multi-room, navigable, instance-editable indoor scenes at a controllable complexity tier, exported to URDF/USD.
🌍 3D Scene Generation
Generate physically consistent and visually coherent 3D environments from text prompts. Typically used as background 3DGS scenes in simulators for efficient and photo-realistic rendering.

🌍 Compose — Task-Driven Worlds
🏞️ Layout Generation
Generate diverse, physically realistic, and scalable interactive 3D scenes from natural language task descriptions, while also modeling the robot and manipulable objects.
🔧 Real-to-Sim Digital Twin Creation
Recreate real-world scenes in simulation with physically plausible digital twins.

💬 Edit — 3D Vibe Coding
💬 3D Vibe Coding
Build and edit sim-ready 3D worlds through natural-language dialogue via Claude Code slash commands (/embodiedgen:*) — each instruction a bounded, physics-validated skill call.
📦 Export — Any Simulators
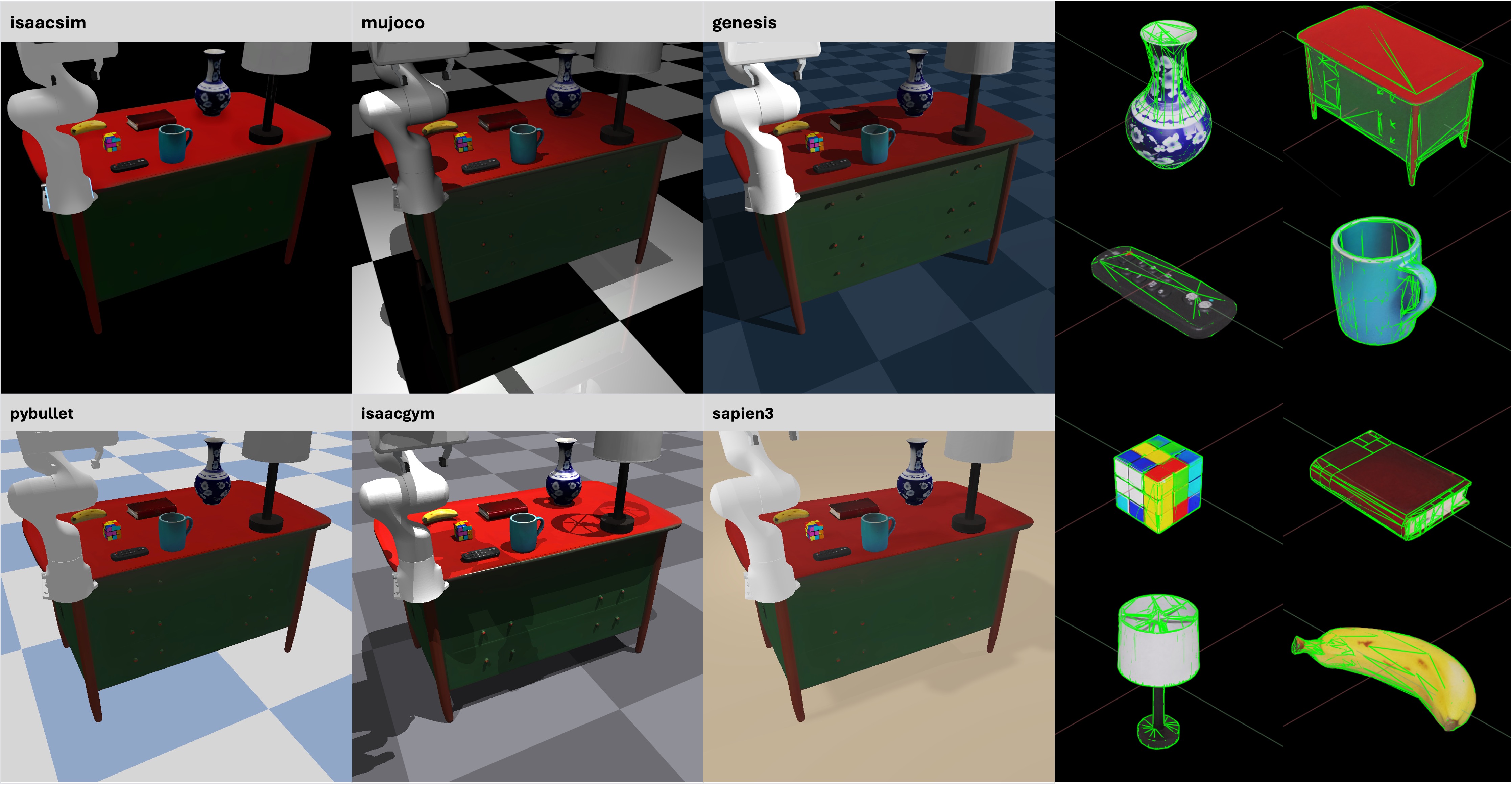
🎮 Use in Any Simulator
Seamlessly use EmbodiedGen-generated assets in major simulators like IsaacSim, MuJoCo, Genesis, PyBullet, IsaacGym, and SAPIEN, featuring accurate physical collisions and consistent visual appearance.
🤖 Train — Robot Learning
🏎️ Robot Learning
Spin up parallel simulation environments with gym.make, record sensor and trajectory data, and evaluate grasp quality of generated assets.