👋 Welcome to EmbodiedGen V2
EmbodiedGen V2: An Agentic, Simulation-Ready 3D World Engine for Embodied AI.
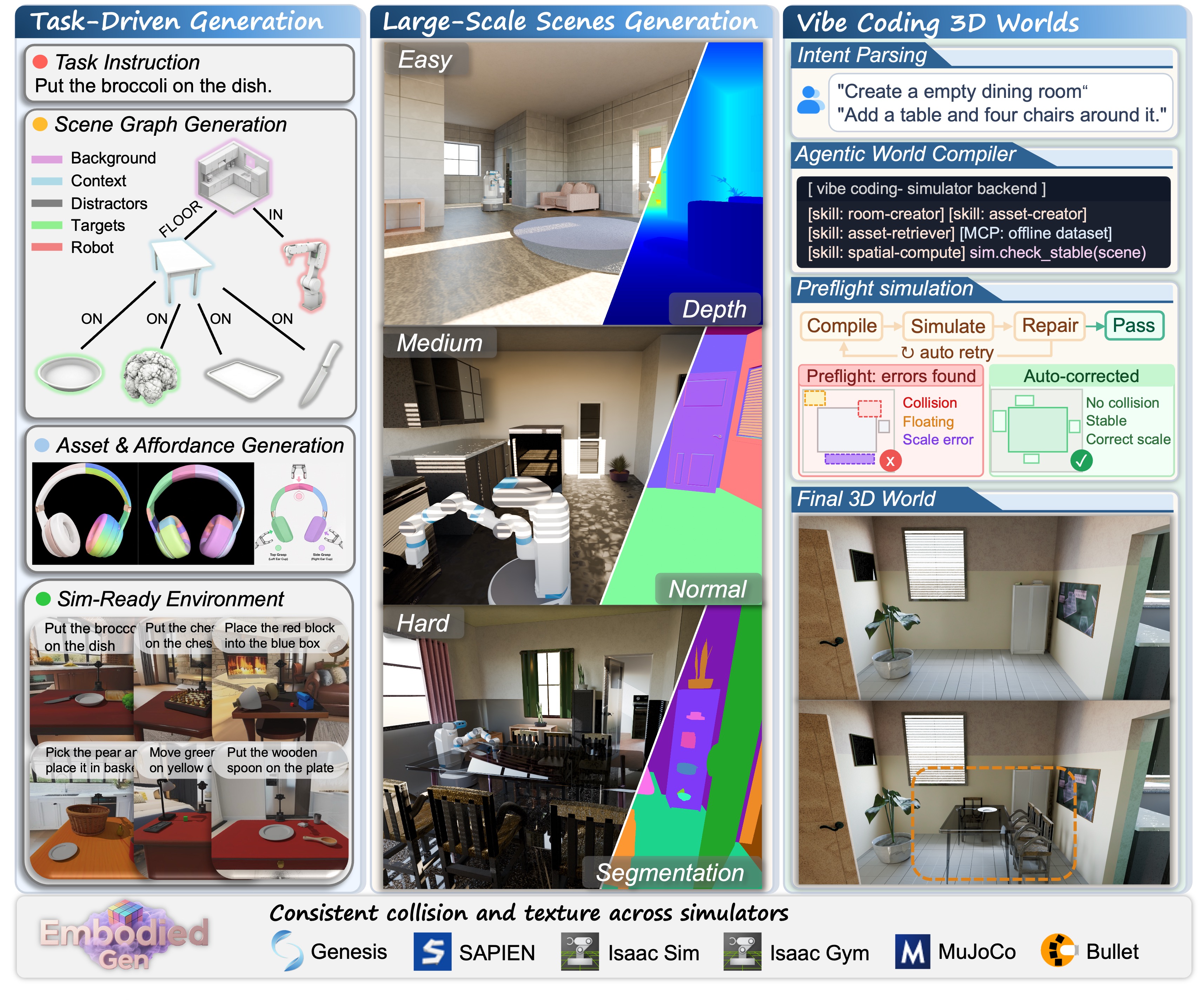
From intent to executable 3D worlds. EmbodiedGen compiles language, images, and edit commands into simulation-ready 3D worlds — physically plausible assets, large-scale scenes, and task-driven interactive environments, deployable across every major robotics simulator.
What can it do?
-
🧱 Generate — Sim-Ready Assets
Turn a single image or a text prompt into a simulation-ready asset: metric geometry, collision proxy, and physical properties.
→ Image-to-3D · Text-to-3D · Texture Generation · Soft-Body Simulation · Affordance
-
🏠 Scale — Large-Scale Scenes
Multi-room, navigable, instance-editable houses and photo-realistic 3DGS backgrounds at controllable complexity.
-
🌍 Compose — Task-Driven Worlds
Natural-language tasks become physically stable, directly loadable interactive layouts with robots and objects.
-
💬 Edit — 3D Vibe Coding
Build and edit deployable world states through dialogue — every instruction a bounded, physics-validated skill call.
-
📦 Export — Any Simulators
One standardized layout loads consistently across SAPIEN, Isaac Sim, Isaac Gym, MuJoCo, Genesis, and PyBullet.
-
🤖 Train — Robot Learning
Generated worlds double as online training environments: parallel gym envs, trajectory recording, grasp evaluation.
Start with the Installation Guide, then follow the Tutorials. Online demos live in Services.