🎮 Use EmbodiedGen in Any Simulator
Leverage EmbodiedGen-generated assets with accurate physical collisions and consistent visual appearance across major simulation engines — IsaacSim, MuJoCo, Genesis, PyBullet, IsaacGym, and SAPIEN.
Universal Compatibility
EmbodiedGen assets follow standardized URDF semantics with physically consistent collision meshes, enabling seamless loading across multiple simulation frameworks — no manual editing needed.
🧩 Supported Simulators
| Simulator | Conversion Class |
|---|---|
| IsaacSim | MeshtoUSDConverter |
| MuJoCo / Genesis | MeshtoMJCFConverter |
| SAPIEN / IsaacGym / PyBullet | .urdf generated by EmbodiedGen can be used directly |
Simulator Integration Overview
This table summarizes the compatibility of EmbodiedGen assets with various simulators:
| Simulator | Supported Format | Notes |
|---|---|---|
| IsaacSim | USD / .usda | Use MeshtoUSDConverter to convert mesh to USD format. |
| MuJoCo | MJCF (.xml) | Use MeshtoMJCFConverter for physics-ready assets. |
| Genesis | MJCF (.xml) | Same as MuJoCo; fully compatible with Genesis scenes. |
| SAPIEN | URDF (.urdf) | Can directly load EmbodiedGen .urdf assets. |
| IsaacGym | URDF (.urdf) | Directly usable. |
| PyBullet | URDF (.urdf) | Directly usable. |
🧱 Example: Conversion to Target Simulator
from embodied_gen.data.asset_converter import cvt_embodiedgen_asset_to_anysim
from embodied_gen.utils.enum import AssetType, SimAssetMapper
from typing import Literal
simulator_name: Literal[
"isaacsim",
"isaacgym",
"genesis",
"pybullet",
"sapien3",
"mujoco",
] = "mujoco"
dst_asset_path = cvt_embodiedgen_asset_to_anysim(
urdf_files=[
"path1_to_embodiedgen_asset/asset.urdf",
"path2_to_embodiedgen_asset/asset.urdf",
],
target_dirs=[
"path1_to_target_dir/asset.usd",
"path2_to_target_dir/asset.usd",
],
target_type=SimAssetMapper[simulator_name],
source_type=AssetType.MESH,
overwrite=True,
)
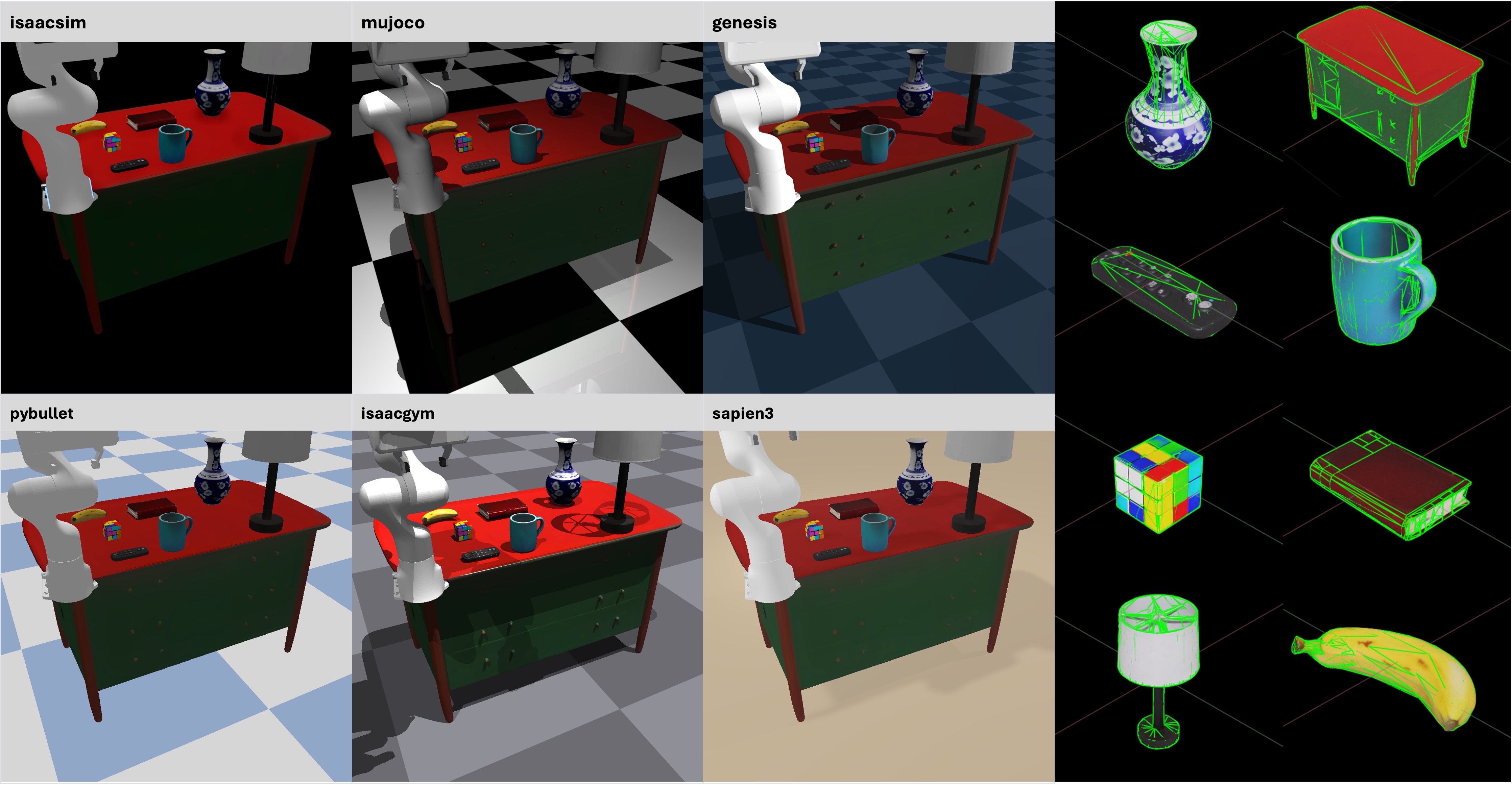
Collision and visualization mesh across simulators, showing consistent geometry and material fidelity.